University of California, Santa Barbara
Disney Research
Pixar Animation Studios, University of California, Santa Barbara
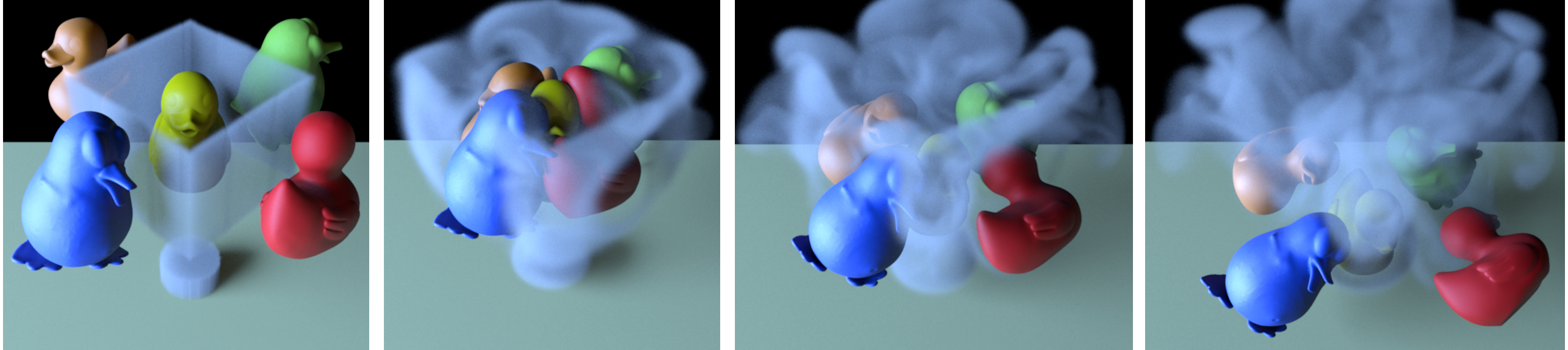
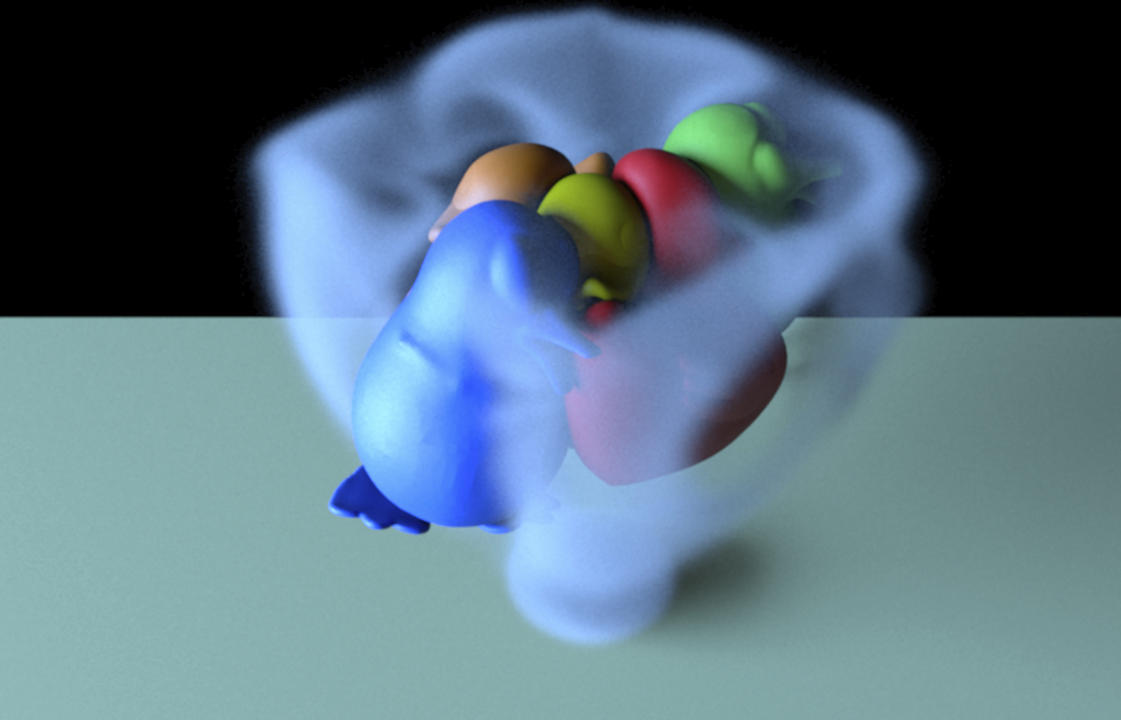
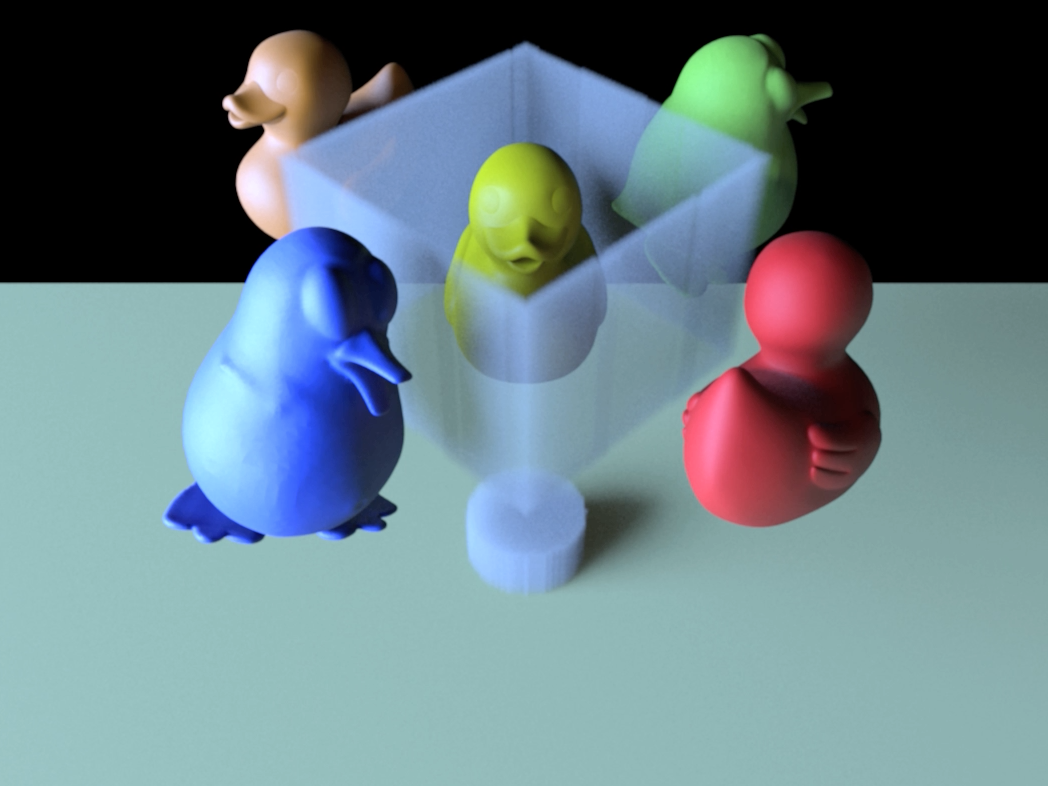
Above:
"Party" scene: Three hyper-elastic and two elasto-plastic objects are squashed into a complex contact configuration, all while fully two-way coupled with the surrounding fluid. All of the objects and the fluid are represented on a 200x180x200 Eulerian grid.
Abstract
We present a new method that achieves a two-way coupling between deformable solids and an incompressible fluid where the underlying geometric representation is entirely Eulerian. Using the recently developed Eulerian Solids approach [Levin et al. 2011], we are able to simulate multiple solids undergoing complex, frictional contact while simultaneously interacting with a fluid. The complexity of the scenarios we are able to simulate surpasses those that we have seen from any previous method. Eulerian Solids have previously been integrated using explicit schemes, but we develop an implicit scheme that allows large time steps to be taken. The incompressibility condition is satisfied in both the solid and the fluid, which has the added benefit of simplifying collision handling.
This work was supported by a National Science Foundation CAREER award (IIS-1253948). Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation. We acknowledge support from the Center for Scientific Computing from the CNSI, MRL: an NSF MRSEC (DMR-1121053) and Hewlett Packard.